
在安装安全光幕或其他电气检测保护装置,请参阅在人体到达危险区域之前,停止机器所需的最小距离当身体进入检测区域时。这些距离在ISO 13855等标准中有定义。安装光幕时,请确保提供安全距离(最小距离),该安全距离由使用光幕的国家或地区的标准、法规和法律等因素确定。
根据ISO 13855计算安全距离
安全距离(S) =人体接近速度×响应时间+附加距离(根据传感器检测能力不同而不同)
进场垂直方向
机器停机所需的最大时间与安全距离的关系
公式中所示的值T是由以下两个参数相加而成的。T =机器停止所需的最大时间+光幕响应时间(开→关)
例如,使用GL-R08H光幕(响应时间为0.0069 s)时
78.74”/ S ×(机器停机所需的最大时间+ 0.0069 S) + C
如上所示,机器停止所需的最长时间乘以渗透速度(2000毫米78.74”/ s),所以如果所需的最长时间机器停止增加仅仅是1秒,安全距离增加了(2000毫米78.74“/ s×1 s = 2000毫米78.74”)。光幕响应时间每增加1 ms,安全距离增加2 mm 0.08”。
基本的计算例子
垂直进近方向:GL-R系列
-
计算示例(1)1
当使用GL-R60H
(探测能力d = 25 mm 0.98"和60束轴)
-
条件:工业应用
K = 2000毫米78.74"/秒
t1 (GL-R60H响应时间)= 0.0157s
机器停机最长时间T2 = 0.1s
C = 8×8(25 - 14)= 88毫米×(0.98 - 0.55)= 3.46”
S = K × T + C = 2000 ×(0.1157)+ 88 = 319.4mm
S = K×T + C = 78.74“×”(0.1157)+ 3.46 = 12.57 "
如果S大于500mm 19.69”,再次进行计算,K等于1600mm 62.99”/ S。如果新计算的结果S小于等于500 19.69”,则设置S为500 19.69”。
-
计算示例(1)2
当使用GL-R08L
(探测能力d = 45 mm 1.77”和8束轴)
-
条件:工业应用
K = 1600毫米62.99英寸/秒
t1 (GL-R08L响应时间)= 0.0069 s
T2(机器停机最长时间)= 0.1 s
C = 850毫米
S = K × T + C = 1600 × (0.1069) + 850 = 1021.04 mm
S = K×T + C = 62.99“×”(0.1069)+ 33.46 = 40.20 "
平行进近方向:GL-R系列
-
计算示例(2)1
当使用GL-R30L
(探测能力d = 45 mm 1.77”和30束轴)
-
条件:工业应用
K = 1600毫米62.99英寸/秒
t1 (GL-R30L响应时间)= 0.0105 s
T2(机器停机最长时间)= 0.1 s
H = 200mm 7.87"
C = 1200 - 0.4 × 200 = 1120毫米
C = 47.24" - 0.4 × 7.87" = 44.09"
S = K × T + C = 1600 × (0.0105 + 0.1) + 1120 mm = 1296.8 mm
S = K×T + C = 62.99“×”(0.0105 + 0.1)+ 44.09 = 51.06 "
通过绕过探测区域的顶部来接近危险:GL-R系列
当不可能阻止人们越过探测区顶部接近危险区域时,需要在考虑这个问题的同时确定光幕的高度和最小距离S。将如下图计算的S值与“垂直接近方向:GL-R系列”中计算的S值进行比较,将较大的值设为最小距离S。
根据a(危险区高度)和b(光幕探测区顶部高度)的值确定CRO,如下表所示。
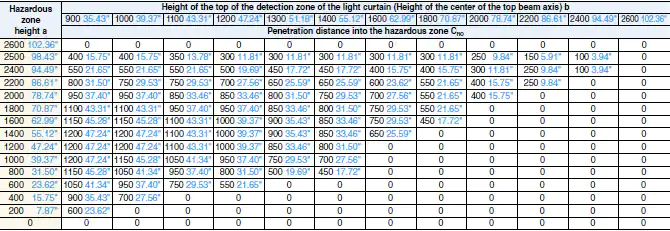
1探测区顶部高度低于900毫米35.43"的情况不包括在内,因为这种情况不能提供充分的保护,防止绕过和跨越。
*2如果检测区域的底部距离参考平面的高度超过300 mm 11.81”,则不能提供足够的保护,防止通过检测区域接近危险。
-
计算示例(3)1
当使用GL-R60H
(探测能力d = 25 mm 0.98”,60束轴,探测高度1180 mm 46.46”)
-
条件:工业应用
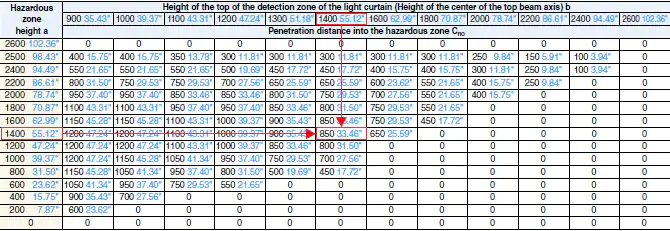
A(危险区域高度)= 1400 mm 55.12"
B(光幕探测区顶部高度)= 1180 + 300 = 1480 mm 46.46”+ 11.81”= 58.27”
-
-
根据上表,CRO为850 mm 33.46”。
(因为b是1480 mm 58.27”,它是在1400 55.12”和1600 62.99”之间。在这种情况下,使用1400 55.12"的b值。)
- K = 1600毫米62.99英寸/秒
- t1 (GL-R60H响应时间)= 0.0157 s
- T2(机器停机最长时间)= 0.1 s
-
S = K × T + CRO = 1600 × (0.1157) + 850 = 1035.12 mm 62.99”×(0.1157) + 33.46”= 40.75”
(这比“垂直接近方向:GL-R级数”下计算的S值大。)
-
计算实例(3)2
当使用GL-R80H
(探测能力d = 25 mm 0.98”,波束轴80,探测高度1580 mm 62.20”)
-
条件:工业应用
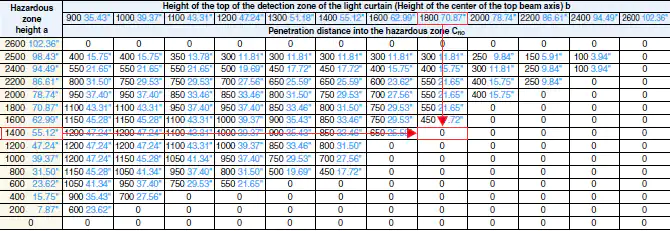
A(危险区域高度)= 1400 mm 55.12"
B(光幕探测区顶部高度)= 1580 + 300 = 1880 mm 62.20”+ 11.81”= 74.02”
-
-
根据上表,CRO为0 mm 0”。
(因为b是1880毫米74.02”,所以在1800年70.87”到2000年78.74”之间。在这种情况下,使用b值为1800 70.87”。)
- K = 2000毫米78.74"/秒
- t1 (GL-R80H响应时间)= 0.0192 s
- T2(机器停机最长时间)= 0.1 s
-
S = K × T + CRO = 2000 × (0.1192) + 0 = 238.4 mm 78.74”×(0.1192) + 0”= 9.39”
(这比“垂直接近方向:GL-R级数”中计算的S值要小。)


























