
焊接机器人控制
本页面介绍了焊接机器人的控制,包括通过教学和使用传感器来控制机器人。

通过教学控制机器人
教学是指导机器人关于焊接操作的过程。引入机器人是必不可少的。教学可以用两种方式完成。在线教学期间,实际上运营机器人以学习操作。在离线教学中,使用CAD或其他方法创建的3D数据和操作被加载到机器人的内存中。
虽然教学是定义机器人操作的重要过程,但它需要很多人。在线教学变得越来越普遍,因为它需要相对较少的人为教学。
在在线教学中,实际操作机器人以进行焊接,并且通过传感器检测移动运动。用传感器检测到的运动被存储为程序。播放存储的操作(教学播放)实现机器人焊接。
在机器人焊接过程中,可以使用非接触式传感器作为机器人的眼睛来执行,从而提高自动焊接的精度跟踪焊缝控制示踪剂或者槽形测量.

用传感器控制机器人
接触传感器控制
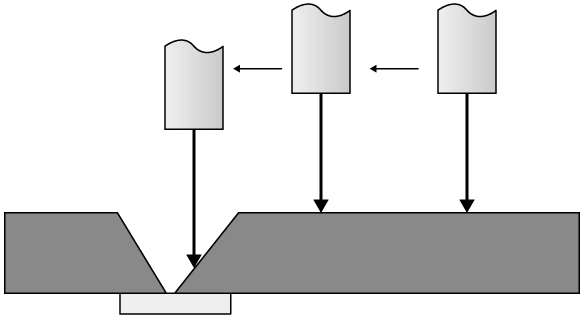
当基材到达线路上,附着在电极或割炬端部上的探针或导线横向横向,并检测焊接位置。通常使用两种类型的接触传感器:触点探头传感器和电线触摸传感器。
一种接触式探头传感器,通过将其与焊枪一起移动的探头应用于焊接位置槽并使它追踪焊线.
电线触摸传感器通过电线通过弱电流,该电线用作填充材料并使焊丝接触基材检测相应的位置(如焊接起点/终点位置或焊头的位置)焊缝)妨碍视力受损的人使用手杖。它的缺点是,当槽的角度或开口宽度波动时,由于传感器需要反复检测接触点,检测时间较长。
使用接触传感器(电线触摸传感器)的检测示例
- 坚持传感
-

- 差距感应
-


- 凹槽打开宽度变化时的示例
-

非接触式传感器控制
用于机器人焊接的非接触式传感器包括电弧传感器和激光位移传感器。
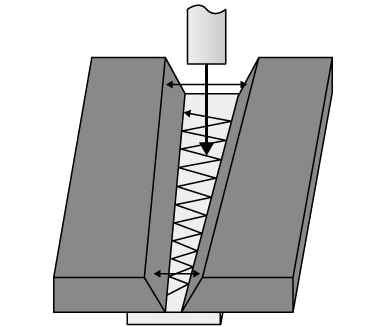
电弧传感器用于消耗电极型电弧焊接,以控制电极同时焊接电流编织沿着凹槽或根据电弧电压的变化控制焊炬的位置。取决于工件的材料,成本相对便宜,但是示踪剂控制可能无法实现。通常,电弧传感器不适合于检测凹槽形状。
另一方面,激光位移传感器是使用激光束和光学传感器的位移计。与其他传感器相比,它们可以更快地检测和输出更多的信息。它们可用于焊缝的快速跟踪控制,并可实时测量坡口形状并反馈到控制系统。随着自动化焊接精度的提高和加工时间的缩短,激光位移传感器的应用越来越多。
根据激光发射方法的不同,可以对激光位移传感器进行分类。一种是通过振动光斑照射目标,另一种是利用激光线照射大面积。例如,在定制的空白(TB)采用激光焊接方法将不同材料和性能的多片钢板以复杂的方式焊接在一起,使材料用于冲压加工,采用狭缝光的激光位移传感器可以快速准确地检测和控制焊缝线。
使用蓝色激光的传感器可以探测到甚至的形状焊接池焊接后立即被加热而变红。实时优化影响熔敷量的各种参数,如焊接电源的电压、电流、焊接速度等,提高了自动焊接质量。
- 激光传感器覆盖了一个大的区域,允许测量和输出的形状,位置和角度的凹槽与单个传感器头。
-
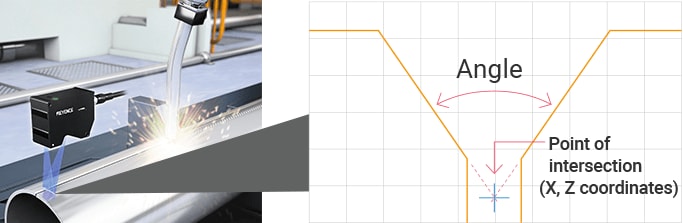
使用LJ-X8000系列高速2D / 3D激光扫描仪的沟槽控制示例。



