
例1:焊缝形状检查
本页面介绍了使用高性能激光位移传感器进行外观检测的实例珠焊接后检测表面缺陷等削弱,重叠和强化不足.

例1-1:激光焊缝二维断面形状检测
焊接后100%的检测是目视完成的,这需要花费大量的人力,而且很难确保高技能和经验丰富的检测人员。人为错误,如忽视微小缺陷,也是一个严重的挑战。使用视觉系统或传统的红色激光位移传感器进行焊接检测,存在因焊枪发出的光或目标的不规则反射而导致错误检测的问题。
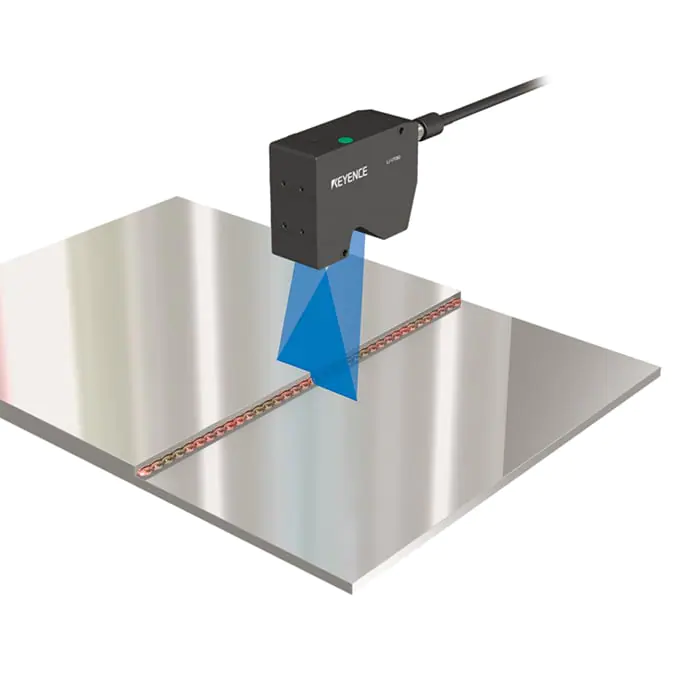
采用LJ-X8000系列高速稳定的截面形状检测
LJ-X8000系列高速二维/三维激光扫描仪能够快速、稳定地检测出目标的截面形状,不受焊接现场光学噪声的影响。该系统可以检测各种形状的目标,解决了焊接100%检测中出现的许多问题。

例如,介绍了LJ-X8000系列的激光焊接工艺定制的空白(TBs)能够稳定地检查珠在不影响加工时间的情况下,焊接后通过机器人跟踪焊枪立即成型。快速采样,最高可达64khz,确保即使移动传感器头跟踪快速移动的自动焊接焊枪,也能稳定检测轮廓。这允许立即检测焊接缺陷减少不良品的生产。欧宝官网开户
- 不同采样速度下轮廓检测的比较
-
传统的激光位移传感器:由于宽的检测间距,投影被忽略了。
LJ-X8000系列:通过高速采样使之成为可能,防止忽略投影。
- 丰富的测量模式,用于检测各种目标
-
LJ-X8000系列提供74种测量模式,允许选择16种测量类型和11种测量目标。适当地使用这些不同的测量模式可以对焊缝进行形状检查焊接接头不同的工件。



-
- 高度
-
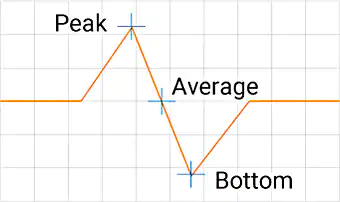
测量指定范围内的高度。
-
- 宽度和位置
-
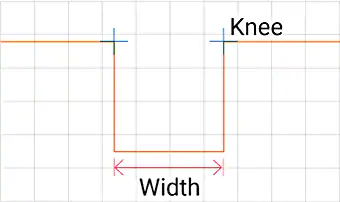
测量指定条件下的宽度和位置。
-
- 角度和十字路口
-
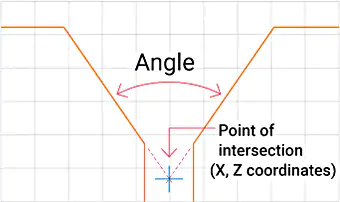
测量一对被测直线与交点之间的夹角。
-
- 主配置文件比较
-
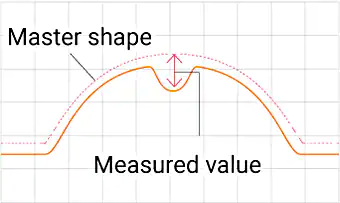
与注册的主形状进行比较,然后测量高度差异最大的区域。
-
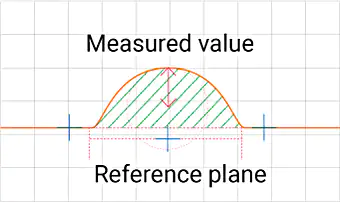
- 高度差
-
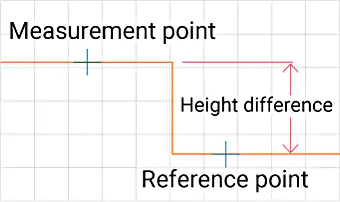
测量从一个参考点到一个测量点的高度差。
-
- 横截面面积
-
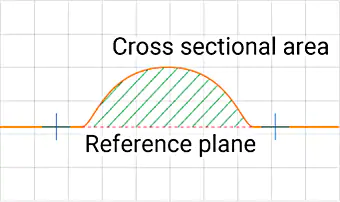
从参考面测量截面面积。
-
- 距离(点-点)
-
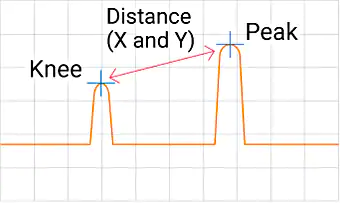
测量两点之间的距离。
-
- 半径和中点
-
测量曲线轮廓的半径和指定点的中心位置的坐标。









例1-2:焊缝的三维形状检查
三维(3D)形状检测能够对焊缝进行更广泛的形状检测,这是仅用二维截面形状数据无法实现的,包括焊缝的体积坑,削弱或重叠,破解珠面,珠道弯曲(珠道弯曲/未对齐)、珠串长度不当(如剩余的沟),起弧,飞溅.
三维形状检测采用LJ-X8000系列和图像处理系统
LJ-X8000系列高速二维/三维激光扫描仪检测到的二维截面形状数据可以转换成三维形状图像,然后进行分析,实现精确的形状检测。

使用LJ-X8000获取焊缝的二维截面形状数据

使用图像处理系统处理多达16284条截面形状数据,生成三维形状图像。

分析焊缝的三维形状图像,以检测各种缺陷。
- 三维形状检测可实现的焊缝形状检测的实例
-
坑/削弱的体积

重叠/珠的高度和体积

焊道表面有裂纹或凹痕
电弧撞击或飞溅
珠条弯曲或错位
珠长度
此外,还可以对各种形状的焊缝缺陷进行在线检测。
重叠、补强不足、残留沟槽、弧击、飞溅等三维形状测量实例
检测项目

坑/削弱的体积

重叠/珠的高度和体积

电弧撞击或飞溅

珠长度

激光焊接后钢筋不足(焊道凹槽)的三维形状检测及分析实例
检测项目

焊道表面有裂纹或凹痕
坑/削弱的体积

三维检查和分析珠弯曲(弯曲/错位)和重叠的例子
检测项目

珠条弯曲或错位
重叠/珠的高度和体积



